Automotive
Automotive Baterie
Baterie Bioprocesy a bioreaktory
Bioprocesy a bioreaktory Čisté prostory
Čisté prostory Datová centra
Datová centra Dřevařství a papírenství
Dřevařství a papírenství Energetika
Energetika Farmacie a medicína
Farmacie a medicína Hutnictví a hornictví
Hutnictví a hornictví HVAC a kvalita vnitřního vzduchu
HVAC a kvalita vnitřního vzduchu Chemie a petrochemie
Chemie a petrochemie Obnovitelné zdroje
Obnovitelné zdroje Palivové články
Palivové články Polohování a robotika
Polohování a robotika Polovodiče
Polovodiče Potravinářství a nápoje
Potravinářství a nápoje Skladování
Skladování Sklářství
Sklářství Strojírenství
Strojírenství Transport a logistika
Transport a logistika Věda a výzkum
Věda a výzkum Vodík
Vodík Vodohospodářství
Vodohospodářství Zemědělství
Zemědělství Životní prostředí
Životní prostředí ADARO
ADARO
 Alco Valves Group
Alco Valves Group
 Crystal Pressure
Crystal Pressure
 AP Tech
AP Tech
 BEKA associates
BEKA associates
 Bronkhorst
Bronkhorst
 CPC
CPC
 Eaton-Azonix
Eaton-Azonix
 Eaton-Gecma
Eaton-Gecma
 Eaton-MEDC
Eaton-MEDC
 Eaton-MTL
Eaton-MTL
 Eaton-FHF
Eaton-FHF
 EKO Instruments
EKO Instruments
 Expo Technologies
Expo Technologies
 Ham-Let (UCT)
Ham-Let (UCT)
 HIMA
HIMA
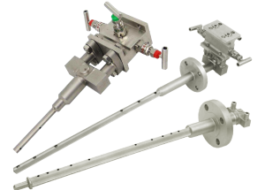
 KSR Kuebler
KSR Kuebler
 Kytola
Kytola
 Mott Corporation
Mott Corporation
 Multi Instruments
Multi Instruments
 Muetec
Muetec
 TecSense
TecSense
 Valex
Valex
 Systec Controls
Systec Controls

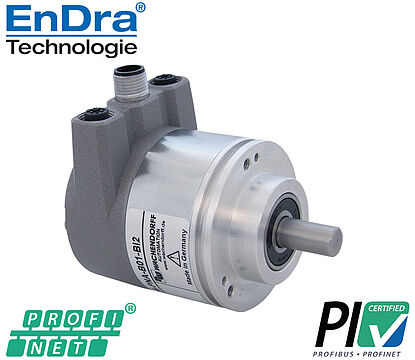
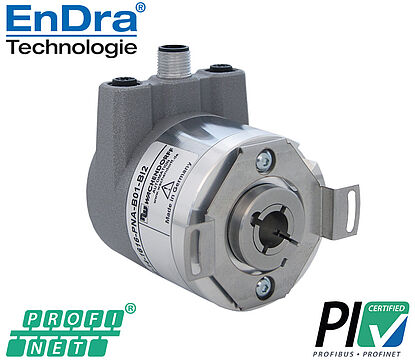
Absolutní enkodéry WDGA (PROFINET-IO, EtherCAT, EtherNet/IP a Universal-IE) Absolute encoders WDGA with PROFINET-IO, EtherCAT, EtherNet/IP and Universal-IE interface

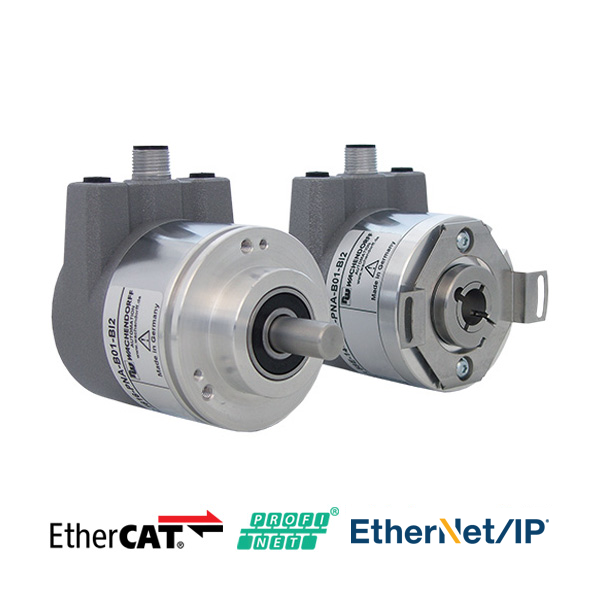


Absolutní magnetické snímače WDGA s komunikačními protokoly PROFINET, EtherCAT, EtherNet/IP a Universal-IE

Země původu
Wachendorff Automation specialisté
 Otáčky: až 8 000 rpm
Otáčky: až 8 000 rpm 16/43-bit jedno/víceotačkový
16/43-bit jedno/víceotačkový Výstup: PN, EtherCAT, EtherNet a Universal-IE
Výstup: PN, EtherCAT, EtherNet a Universal-IE Teplota: -40 °C až +85 °C
Teplota: -40 °C až +85 °C Krytí: IP65, IP67
Krytí: IP65, IP67 Bez baterie
Bez baterie
Snímače/enkodéry série WDGA s komunikačními protokoly PROFINET-IO, EtherCAT, EtherNet/IP a Universal-IE
Absolutní enkodéry WDGA jsou rotační snímače polohy a otáček, které poskytují okamžitou informaci o aktuální stavu. Díky patentované technologii EnDra® se tato informace neztratí ani po výpadku napájení, není zde použita ani záložní baterie. Pracují na magnetickém principu a dělí se na jednootáčkové a víceotáčkové.
PROFINET-IO, EtherCAT a EtherNet/IP jsou komunikační sběrnice pro řídící systémy v oblasti průmyslové automatizace. Nejvíce se uplatňují u jednoduchých distribuovaných zařízení pro real-time komunikaci typu Master-Slave s řídicími systémy. Enkodéry WDGA mohou být vybaveny také univerzálním Industrial Ethernetem, kde si zákazník může volit výše uvedené komunikační protokoly jednoduchým nahráním příslušného firmware.
Enkodéry WDGA lze dodat i s jinými komunikačními protokoly jako jsou SSI, RS485, SAE J1939, Profibus, CANopen, CANopen LIFT.

Enkodér WDGA 58A PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4
Enkodér WDGA 58B PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4

Enkodér WDGA 58D PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4
Enkodér WDGA 58E PROFINET-IO (cov)
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4

Enkodér WDGA 58F PROFINET-IO (cov)
Absolutní hřídelový snímač, magnetický
Nejkompaktnější PROFINET enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: PROFINET-IO (CC-C)
Profil zařízení: přepínatelný, třída 3, 4

Enkodér WDGA 58A EtherNet/IP
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58B EtherNet/IP
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58D EtherNet/IP
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58E EtherNet/IP
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58F EtherNet/IP
Absolutní hřídelový snímač, magnetický
Nejkompaktnější EtherNet/IP enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherNet™
Klasifikace zařízení: Snímač polohy se zapojením do kruhu DLR (Device Level Ring)

Enkodér WDGA 58A EtherCAT (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58B EtherCAT (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58D EtherCAT (cov)
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58E EtherCAT (cov)
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58F EtherCAT (cov)
Absolutní hřídelový snímač, magnetický
Nejkompaktnější EtherCAT enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: EtherCAT
Profil zařízení: CiA DS-406 V4.0.2, třída 3

Enkodér WDGA 58A Universal IE (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58B Universal IE (cov)
Absolutní hřídelový snímač, magnetický
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58D Universal IE (cov)
Absolutní hřídelový snímač, magnetický, pro velká zatížení
Pouzdro: Ø 58 mm
Hřídel: Ø 12 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58E Universal IE (cov)
Absolutní snímač s dutou hřídelí (neprůchozí otvor), magnetický
Pouzdro: Ø 58 mm
Vrtání (neprůchozí): Ø 12, 14, 15 mm;
s adaptérem Ø 6, 6.35 (1/4″), 7, 8, 9.525 (3/8″), 10 mm
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)

Enkodér WDGA 58F Universal IE (cov)
Absolutní hřídelový snímač, magnetický
Nejkompaktnější Universal IE enkodér na světě!
Pouzdro: Ø 58 mm
Hřídel: Ø 6 mm, Ø 8 mm, Ø 10 mm, Ø 3/8″
jedno/víceotáčkový, 16/43 bit
Připojení: 3× konektory M12
Protokol: volitelný (PROFINET-IO, EtherCAT, EtherNet/IP)
Příslušenství enkodérů Wachendorff









 Absolutní enkodéry WDGA s technologií EnDra®
Absolutní enkodéry WDGA s technologií EnDra®

 Absolutní enkodéry WDGA s protokolem CANopen
Absolutní enkodéry WDGA s protokolem CANopen
 Absolutní enkodéry WDGA s protokolem CANopen LIFT
Absolutní enkodéry WDGA s protokolem CANopen LIFT
 Absolutní enkodéry WDGA s protokolem SSI
Absolutní enkodéry WDGA s protokolem SSI
 Absolutní enkodéry WDGA s protokolem PROFIBUS
Absolutní enkodéry WDGA s protokolem PROFIBUS
 Absolutní enkodéry WDGA s protokolem PROFINET
Absolutní enkodéry WDGA s protokolem PROFINET
 Absolutní enkodéry WDGA s protokolem EtherNet/IP
Absolutní enkodéry WDGA s protokolem EtherNet/IP
 Absolutní enkodéry WDGA s protokolem EtherCAT
Absolutní enkodéry WDGA s protokolem EtherCAT
 Absolutní enkodéry WDGA s protokolem Universal IE
Absolutní enkodéry WDGA s protokolem Universal IE
Měření rychlosti a polohy pohybu u průmyslových robotů
V průmyslových aplikacích, jako je například obrábění kovů nebo montážní linky, je klíčové mít roboty, kteří mohou pohybovat obrobky rychle a přesně, což zvyšuje celkovou efektivitu výrobního procesu. Enkodéry umožňují robotům dosáhnout optimálních trajektorií pohybu a minimalizují chyby, což je zásadní pro dosažení kvalitních výsledků v průmyslové výrobě.

Nepřetržitá automatizace vrtných souprav
Enkodéry jsou nedílnou součástí moderních vrtných souprav a hrají zásadní roli při zvyšování efektivity, přesnosti a bezpečnosti vrtání. Uplatňují se především absolutní enkodéry s magnetickým principem snímání, které hravě konkuruje přesnosti optických enkodérů a zároveň dávají skvělou alternativu pro aplikace se silnými mechanickými vibracemi a nejrůznějším robustním zařízením.

Koordinace pohybu plnicích a stáčecích linek
Automatické plnicí a stáčecí linky jsou nepostradatelnou součástí nápojového a potravinářského průmyslu, kde přesnost a spolehlivost hrají klíčovou roli. Tyto linky jsou navrženy pro plnění obalů, a enkodéry jsou zde důležitým prvkem, který umožňuje těmto strojům pracovat vysoce efektivně.

Řízení úhlu natočení lopatek a nastavení azimutu u větrných elektráren
Využití obnovitelných energií, jako jsou větrné elektrárny, má zásadní význam pro ochranu klimatu a životního prostředí. V posledních letech získává stále větší význam využívání větrných turbín, jak na pevnině, tak i na moři. Důležitým faktorem pro dosažení co nejvyššího energetického výkonu je vysoká účinnost elektráren. V tomto ohledu jsou přesné snímače jejich klíčovým prvkem, které pomáhají optimalizovat výkon a snižovat náklady na údržbu.

Simulace namáhání automobilových brzd
Automobilové brzdy jsou jedním z klíčových prvků vozidla, které zajišťují bezpečnost řidiče a ostatních účastníků silničního provozu. Je důležité, aby brzdy byly spolehlivé a zajišťovaly dostatečný brzdný výkon v různých situacích a podmínkách. Proto se při vývoji a testování nových typů brzd používají různé metody, které simulují namáhání brzd v různých podmínkách. Jednou z metod simulace namáhání brzd je tzv. dynamická simulace, kdy se používají speciální testovací zařízení, která umožňují simulovat jízdu vozidla v různých podmínkách.
Aplikace související s výrobcem Wachendorff Automation

Odměřování ujeté vzdálenosti autonomních vozíků
První autonomní vozík (AGV) byl vyvinut v 80. letech. Bez senzorové technologie by to nebylo možné. Díky neustálému vývoji senzorů se stále více AGV zavádí do provozů, zvyšuje se tak efektivita skladového hospodářství a bezpečnost na pracovišti. Senzory se programují dle vnějších podmínek a přenášejí data do hlavního řídícího modulu AGV, což umožňuje autonomnímu vozíku pohybovat se po pracovišti a plnit zadané úkoly bez lidského zásahu.

Ovládání otočných a teleskopických ramen
Jedním ze způsobů, jak zajistit přesné polohování např. ramen jeřábů a montážních plošin, je použití absolutních enkodérů s komunikací CANopen. Tato komunikace je kvazi standardem v automobilovém průmyslu, snadno definuje priority a dělá tak systém extrémně stabilním. Tyto enkodéry umožňují precizní měření polohy, rychlosti, sklonu a úhlu natočení v reálném čase, což je důležité pro spolehlivé a precizní ovládání strojů.

Systém pro zpětnou vazbu polohy
Systém pro zpětnou vazbu polohy (anglicky "position feedback system") je soubor technologií a zařízení, které slouží k měření a kontrole polohy objektu nebo mechanického zařízení. Tento systém je klíčovým nástrojem pro automatizaci pracovních procesů v různých průmyslových odvětvích. Systém pro zpětnou vazbu polohy se skládá z řídící jednotky, senzorů polohy, kterými mohou být např. enkodéry, a akčních členů.
Relevantní články z blogu
- Rozdíl mezi inkrementálním a absolutním rotačním enkodérem
Rotační enkodéry (snímače) jsou elektromechanické převodníky, které převádí rotační pohyb na sekvence elektrických digitálních impulzů. Dle principu snímání je můžeme rozdělit na optické a magnetické, a dle poskytované informace na inkrementální (přírůstkové) a absolutní…
- Absolutní enkodéry WDGA pro náročné podmínky
Společnost Wachendorff, lídr ve výrobě enkodérů, představuje magnetické absolutní enkodéry s patentovanými technologiemi QuattroMag® a EnDra®. Pomocí těchto dvou magnetických technologií, které hravě konkurují přesnosti optických enkodérů, dává skvělou alternativu pro aplikace se silnými mechanickými vibracemi a nejrůznějším robustním zařízením…
- Nejrychlejší a nejkompaktnější enkodér s PROFINET na světě
Trend digitalizace a s ní související automatizace přinášejí neustále do procesu výroby nové možnosti. To se dotklo i nasazení komunikačního protokolu PROFINET-IRT pro automatizační prvky – enkodéry (rotační snímače rychlosti a polohy)…
Podobné produkty




Nezávazná poptávka nebo dotaz
produktový specialista

produktový specialista